Mechanics of Robotics
Before starting to make a robot, there are some basic fundamentals which we all should be aware of, and have a clear understanding of the facts in order to appreciate the physics that goes behind making even the simplest of robots. In short, we will precisely deal in the basic mechanics of robotics which we should know to be able to implement the core concepts and optimize and tune the forces related with robots looking forward to better efficiency. Few of the essential parameters are discussed here in details :
>> Velocity : Velocity is one of the most important criteria that you need to take into account while designing your bot. The linear velocity that your bot is expected to have, is calculated prior to selection of the motors and is calculated by the simple formula :
V = N x R
Where, V = velocity of the robot,
N = Rotations Per Minute (speed) of the motors, and
R = radius of the wheels used.
Now if you are planning to make a bot whose front and rear wheels are of different sizes (like the configuration present in a tractor), you will have to make sure that the linear velocity of the front pair of the wheels and that of the rear pair of wheels should be same, so that your bot is steady in its running condition. Now to achieve same linear velocity, the product of the radius of the wheel and the angular velocity (RPM) of the motors has to be the same. For this we have to use motors of different RPM, (suppose N1 and N2) and wheels of different radii (R1 and R2). So the equation to be satisfied is :
N1 X R1 = N2 x R2
For example if you are planning to use a 300 RPM motor and wheels of diameter 5cm in the front, the rear configuration should be 150 RPM and 10cm wheels. So take account of the motors and the wheel specifications while designing.
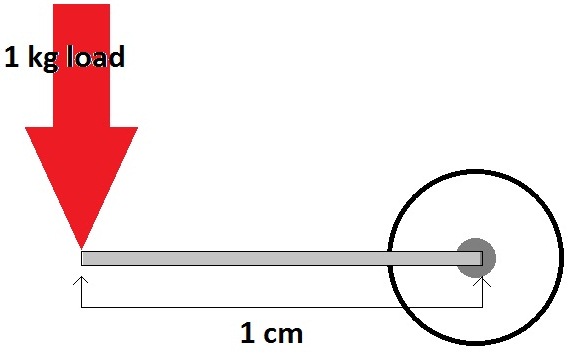
>> Torque : Another essential parameter goes into the mechanics of robotics is the torque or the rotational force expressed by the motors. It is commonly expressed in Kg-cm locally. Now, what Kg-cm expresses is that the motor is able to lift 1 Kg force tangentially at a distance of 1 cm. Now with increasing distance from the center of the motor; the lifting capability of the motor decreases and with decreasing the distance, the reverse happens. So, with a 1 kg-cm motor, at a distance of 10 cm, only a mass of 0.1 kg i.e. 100 grams can be lifted tangentially (in the configuration shown in the figure below). This is how the torque equation works.
T = F x R
So the robot will be able to carry altogether a total mass of T/R x K where K is the number of motors/wheels. So this is how you determine the total mechanical power of the bot.
For example if you make a robot of 6 wheels and are using motors of 10kg-cm torque and wheels of 10cm diameter, then the total weight that the motors can pull along will be 10/5x6=12kgs.
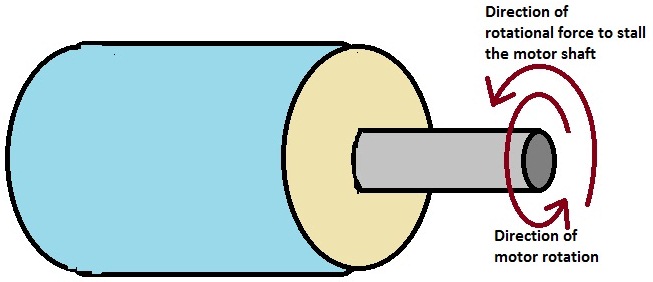
>> Stall Torque : The word Stall means to stop. Stalling a motor means applying a rotational force in the direction, opposite to the direction in which the motor shaft is rotating hence causing it to stop finally. When the motor is completely stopped even when it is powered up from a battery, we say the motor has stalled. Stall Torque, hence is also a measure of the maximum mechanical power of the motors i.e. the maximum torque that is given out by a motor. So all the power calculations such as deciding on the torque of the motors to be used for lifting an amount of mass on its body, has to be done while taking into concern the STALL values.
>> Wheel Radius : All our equations above had the Wheel Radius in it, hence it is well understood that it has a key role in governing and interconnecting the above mechanics of robotics in some fashion. Well some points to note down will be :
i) Increasing the wheel radius, decreases the overall torque of the robot; but the velocity increases.However, decreasing the wheel radius, increases the overall torque of the robot, but the linear velocity decreases.
ii) Increasing the number of motors increases the overall torque of the robot keeping the wheel radius constant

